Researchers at Universitat Jaume I in Spain have developed a bio-inspired robotic fish designed to improve monitoring in aquaculture systems while reducing stress on farmed fish.
The prototype, known as UJIFISH, was created by the university’s Centre for Research in Robotics and Underwater Technologies. It is intended for a range of applications including inspection, teleoperation and sensor deployment, offering an alternative to conventional underwater robots that rely on propellers and bright lighting.
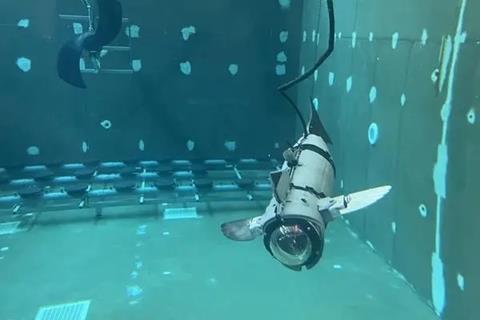
Unlike traditional systems, the robotic fish uses undulatory propulsion, mimicking the natural swimming motion of real fish through smooth, wave-like movements. This design reduces turbulence, noise and visual disturbance in the water, factors that are known to affect fish behaviour and welfare in aquaculture environments.
Initial testing has demonstrated high manoeuvrability and reliable target detection, supporting the robot’s suitability for tasks such as net inspection and environmental monitoring. Its fish-like size and movement enable it to integrate more naturally into aquaculture settings, allowing it to operate close to stock with minimal disruption.
The system is equipped with cameras and sensors capable of collecting and transmitting real-time data. A wide-angle camera with a 180-degree field of view supports visual monitoring, while onboard sensors continuously measure water temperature and depth. Additional sensors can be integrated to monitor parameters such as salinity, pH and dissolved oxygen.
UJIFISH can operate at depths of up to 20 metres and be controlled remotely via cable or acoustic communication. It has an operational range of up to 150 metres vertically and 500 metres horizontally, providing flexibility for different aquaculture setups.
The robot also includes a mechanism for carrying and releasing small devices at designated locations, supporting targeted sensor deployment within farming systems. Its adaptable design allows it to meet varying monitoring requirements across species, infrastructure types and environmental conditions.