With its robot-supported processing and packing system for fish and shrimp, Cabinplant A/S claims it has followed a completely new path: products are no longer processed in individual, linked steps; instead, all processing is performed on the path from the conveyor belt to the package.

The technical basis of this system is the ELAU PacDrive technology, which unifies motion control, PLC, and robotics on a single control platform.
All processing steps – cutting off heads and tails, removal of viscera etc – are performed during the pick-and-place operation, by which a robot transports individual products from a feed conveyor into a package.
This procedure eliminates a number of the handling steps required to link individual processing stations by traditional methods, which also take up extra time and space, said Denmark-based Cabinplant.
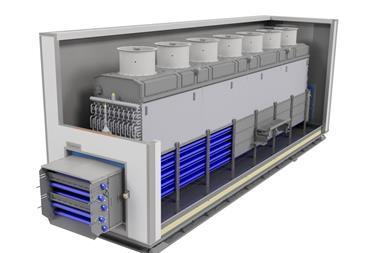
The compact system has easy access from all sides and consists of a bunker with an elevator belt, a vibratory conveyor, a robot cell with a continuous conveyor belt, and an image processing system throughout the feeding area of the conveyor belt.
A variable number of integrated Delta 3 robots, all equipped with identical multifunction tools, can approach the conveyor belt. A conveyor chain runs on both sides of the belt to deliver and remove the packages. The entire system, including the robots, is designed in stainless steel for easy cleaning.
The process begins in the bunker, in which the fish or shrimp are kept as bulk material. An elevator belt takes the products from the bunker to the vibratory conveyor. On this belt the product layer is spread to cover the entire width of the conveyor belt, and the single products are pre-aligned.
On delivery to the conveyor belt, a camera records the position of each individual product and determines its length. Based on this length, a software algorithm calculates the weight without the use of scales.
The continuous conveyor belt transports the products into the work envelope of the robot. The robot picks up the products individually and makes use of the multifunction tool to perform all the processing steps: a cutting tool removes heads and tails (only heads for shrimp); a suction tool is inserted to remove the viscera; the system calculates the position of each product based on camera information and belt movements; one vision system is sufficient for up to five robots; another system is required for a larger number of robots.
The robot places the fully-processed and properly aligned products into the package, which is continuously filled and moved along the conveyor.
The single or multiple robots are capable, for example, of cross-packing sardines with belly side upwards into cans on both sides of the conveyor belt. The products can be packed in alternating directions to facilitate space utilisation and to create a more appetising presentation of the contents.
Several types of cans can be used, including Dingley and Club cans.
Multihead weigher
The filling process is controlled by weight, similar to the principle of a multihead weigher, although it is based exclusively on the data obtained from an optical measurement/weight calculation.
To minimise giveaway when filling the package, the robot combines products, the joint weight of which is as close as possible to the minimum weight.
A further advantage is that the cutting of sardines is carried out individually, enabling cutting in the best possible position.
According to Henning Ingemann Hansen, Cabinplant’s R&D director, the use of this method can reduce the giveaway by 10-12% compared with traditional solutions.
Depending on product type, size and weight, the robot can process and pack 40-50 products per minute. Using cascading multiple robots the total input of the machine can be increased in a linear ratio to the number of robots.
The modular machine design is based on a PacDrive automatic solution created by ELAU, a subsidiary of Schneider Electric. A central PacDrive controller with motion control, PLC, and robotic functions controls all mechatronics of the machine as well as the robot or robots.
The controller makes calculations to determine the weight of each product. The robots communicate with the controller via SERCOS. The speed-controlled conveyor belt drives are directly connected to the PacDrive controller I/O, as are all other sensors and actuators. The control unit and the image processing system are linked to the controller via Ethernet.
All ELAU PacDrive P4 pick-and-place robots are equipped with iSH servomodules. These iSH servomodules are integrated drives, which combine servomotor and drive electronics in one single assembly. Each robot is connected to the shared power supply and the motion logic controller in a flexible design, each with only one hybrid cable and a self-configuring distribution box.
The SERCOS interface, power supply, and all other motor signals are led through one single cable, using two-sided pluggable hybrid cables. One pluggable cable provides the electrical and communication connection for integration of each robot into the system.
One major advantage of the modular machine design is that the integration of 10 robots requires only three power supplies more than for the pilot version with only one robot. The robots can be integrated into the automation solution by one single pluggable cable.
Additional self-configuring distribution boxes on the machine frame provide the needed number of sockets.
The software design is based on the PacDrive programming template, which allows users to map software modules to the corresponding mechanical modules on the machine. The IEC machine programme was created by using IEC 61131-3-compliant Function Blocks both for the mechatronics and the robots.
Each additional robot is integrated into the machine programem as a software module.
The vision system is incorporated using Function Blocks from the universal VisionLib library for popular image processing systems.
Regardless of the number of robots involved, the machine can be equipped with the usual options: a checkweigher double-checks the package weight, if needed, and a printer applies product data to the package, enabling batch tracing.
Extremely Compact
Hansen believes that there is a big international market for such a machine design. “The elimination of transfer steps between the processing steps saves time. Moreover, the system is extremely compact relative to its output. According to our calculations the investment costs for such a machine will be amortized after only 1-1.5 years.”
Cabinplant is currently designing a system to process sardines for a customer in Greece. Plans for this system include 10 P4 robots, which will be sufficient for a throughput rate of 400-500 products per minute.
“This will give an output of 80-120 cans per minute, depending on the fish size," said Hansen.
He explained an expansion of the system to 10 robots was not a problem from a technical point of view.
“The machine is completely modular, not only speaking mechanics and software, but also with regard to the electronics. As the robots have iSH drives, expansions to the system need no additional wiring in the control cabinet. Operation with 10 robots requires only another few power supplies. We designed the PacDrive programme structure-based software to be modular right from the start, enabling flexibility as to the integration of more robots."
Related Companies
- Previous
- Next